Research Summary
Even today's best robots are considered 'fragile' for real-world utilization. They break easily - sometimes simply colliding into an obstacle in their environment. Once damaged, robots are often limited to pre-specified compensatory behavior and therefore, unable to recover adequately for continuing operation. In order to avoid such failure, they need to be able to sense internal states and environmental conditions. In contrast, animals are remarkably robust - can anticipate uncertainties to avoid fatal damage, tolerate construction flaws and rapidly adapt to changing environmental situations.
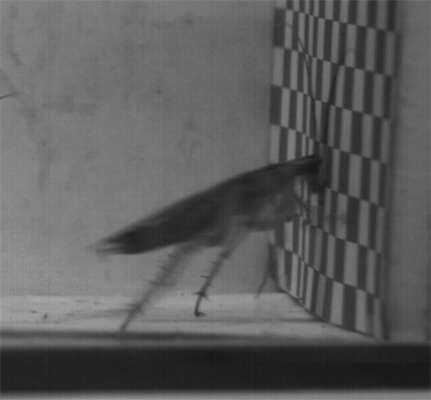
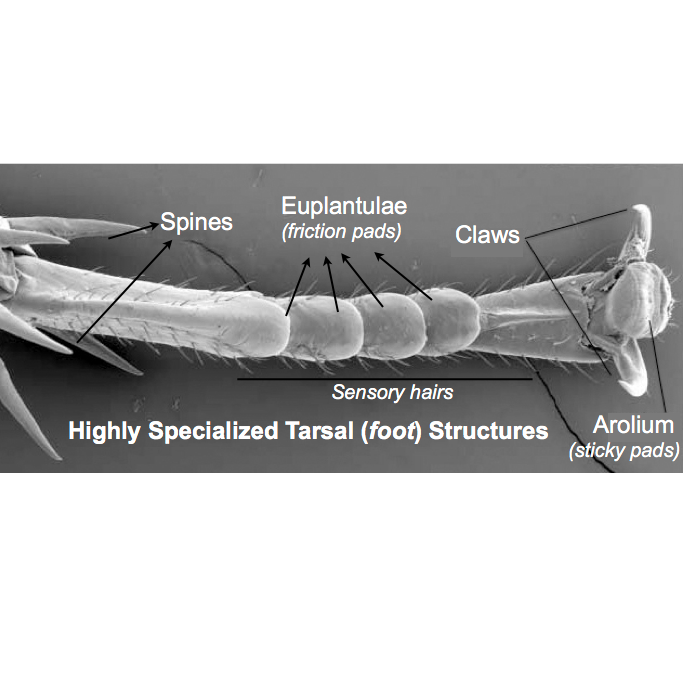
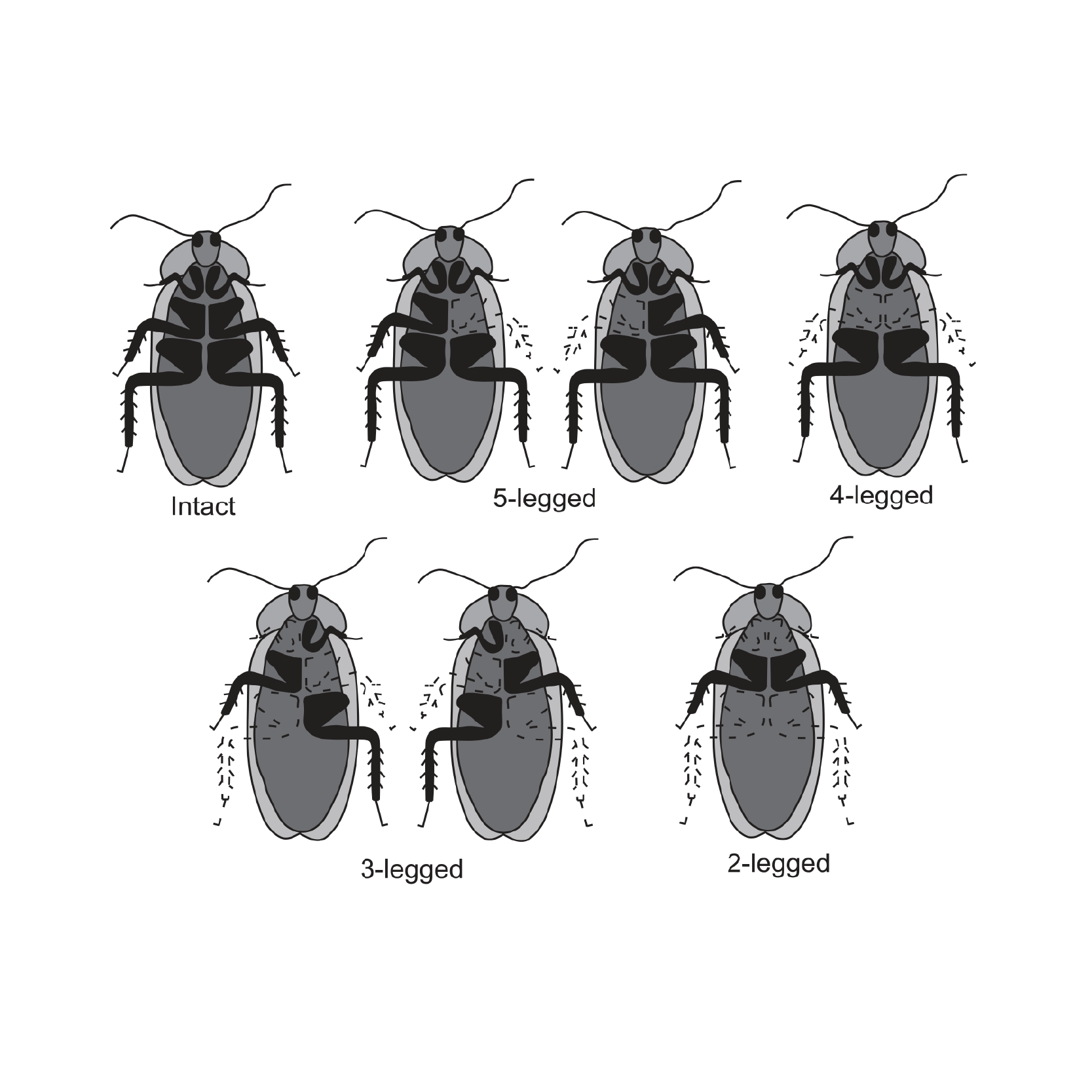
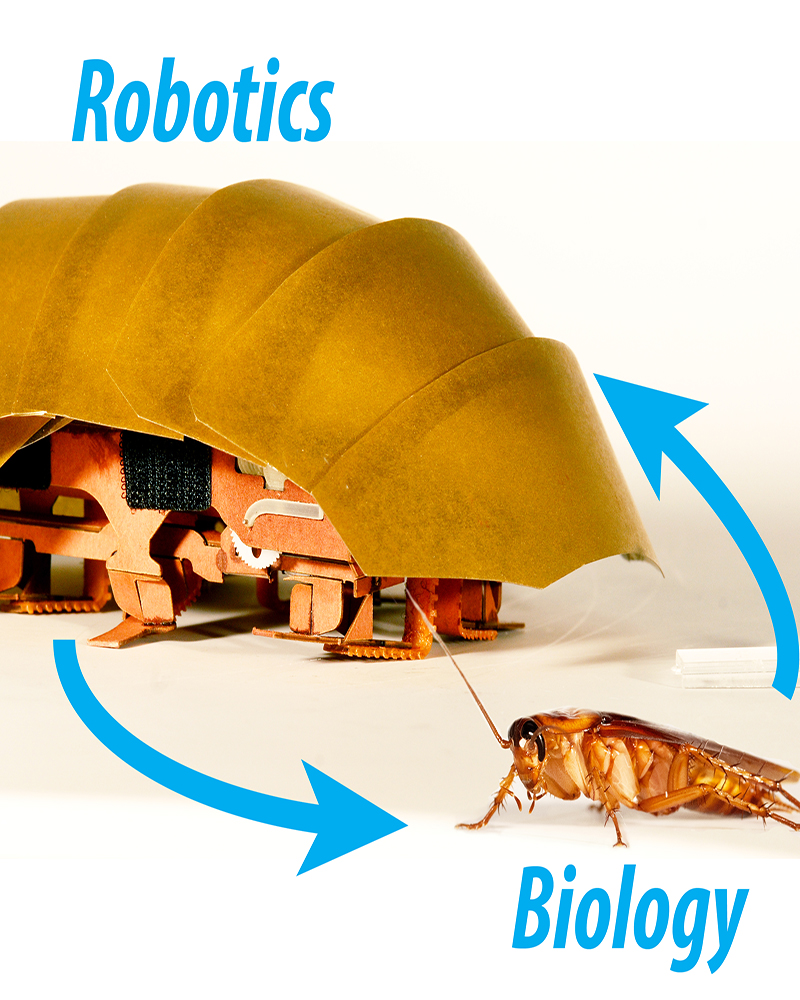
My doctoral research (at Bob Full's POLYPedal Lab, UC Berkeley) involved understanding mechanisms of robustness during high-speed locomotion in cockroaches despite naturally occurring perturbations such as head-on collisions, body deformations and partial or complete amputations.
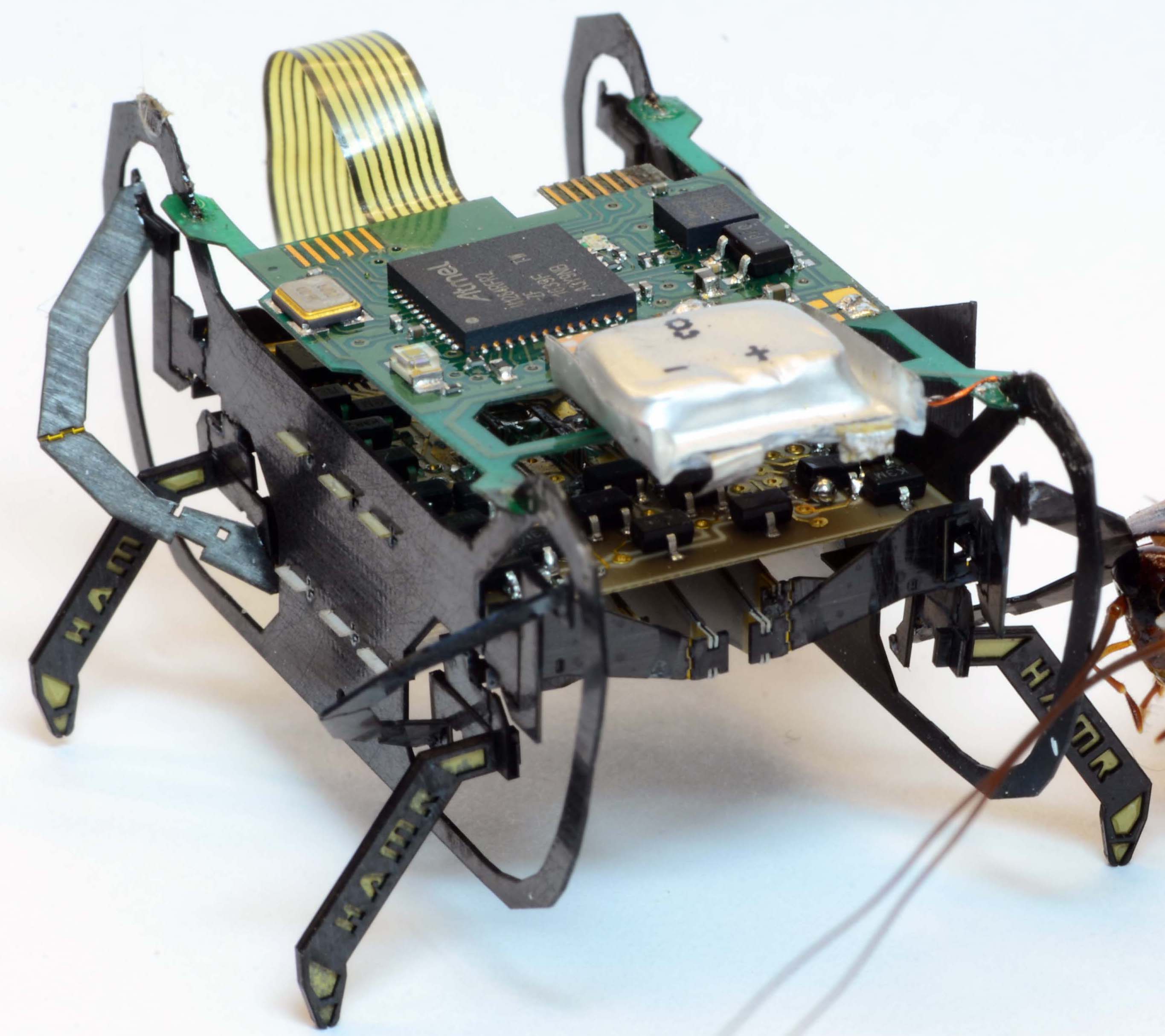
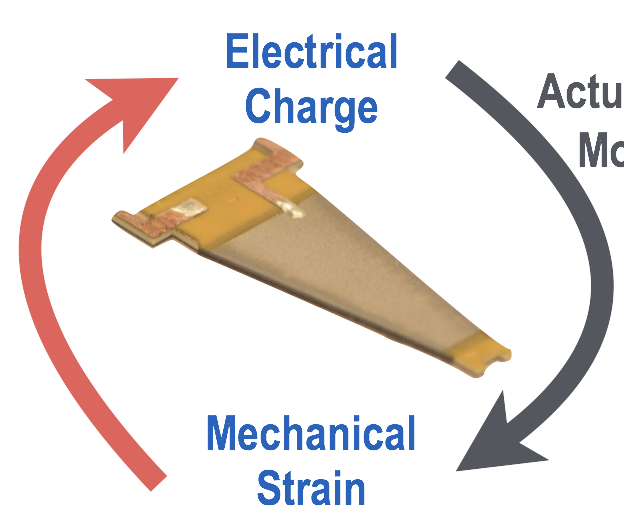
My post-doctoral (current) research aims to integrate some of these principles of robustness of animal systems into robots for effective real-world locomotion performance. My current project focusses on manufacturing miniature sensors for microrobots.
Please see below for details of individual projects. Check out the related YouTube channel and press coverage.
Interests
- Robustness
- Impacts & Collisions
- Appendage Loss & Damage
- Confined Locomotion
- Distributed Sensing